Salut, les amis! Aujourd'hui, on se plonge dans un truc qui a l'air hyper compliqué, mais qui, promis juré, ne l'est pas tant que ça. Accrochez-vous, on va décortiquer ensemble la forme canonique d'une fonction de transfert du second ordre. Oui, ça sonne comme une incantation magique, mais c'est juste un outil super pratique pour comprendre comment nos systèmes réagissent. Imaginez que c'est la recette secrète pour faire danser vos robots préférés (ou pour éviter qu'ils ne tombent en se cognant contre le mur, ce qui serait quand même un peu dommage).
Le Second Ordre, Késako?
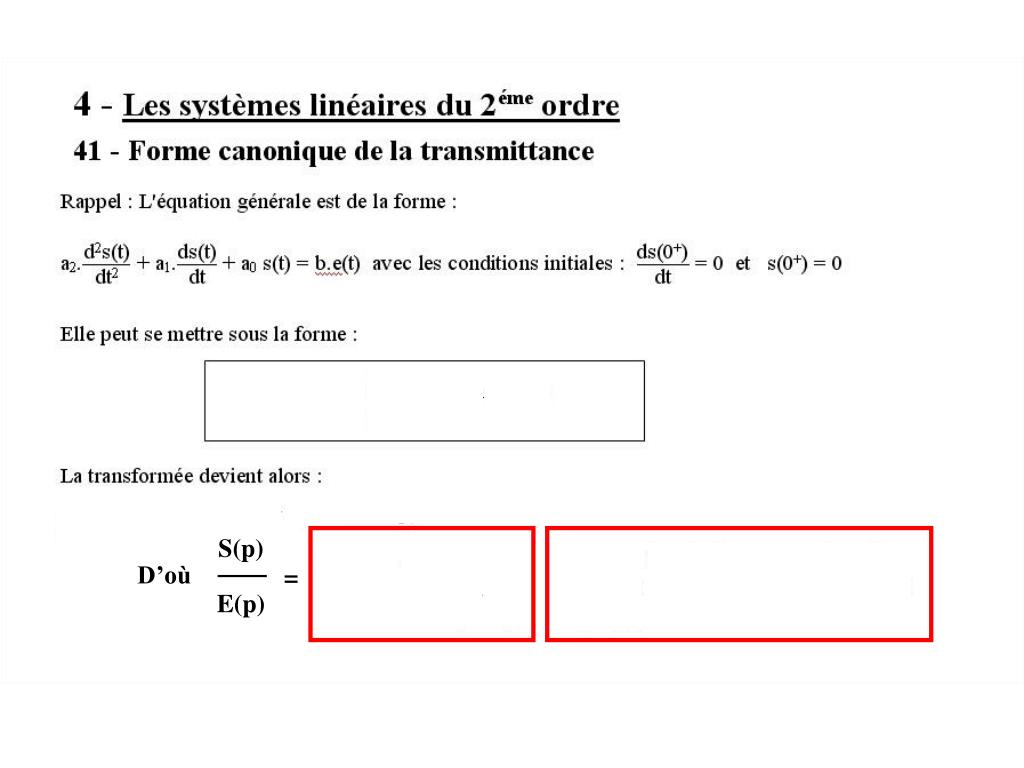
Avant de se lancer dans le vif du sujet, posons les bases. Qu'est-ce qu'on entend par "second ordre"? En gros, ça veut dire qu'on a une équation différentielle où la dérivée la plus élevée est d'ordre 2. Pas de panique, on ne va pas ressortir nos vieux cours de maths (enfin, pas trop). Visualisez ça comme un système qui a une inertie, une sorte de "mémoire" de son état passé. Pensez à une balançoire : elle n'arrête pas instantanément quand on la pousse, elle continue à osciller un peu. Voilà, c'est ça, le second ordre! (Et non, ça n'a rien à voir avec votre café du matin, même s'il est indispensable pour affronter ces notions!).
Pourquoi s'embêter avec ça?
Bonne question! Pourquoi se compliquer la vie avec des équations et des "formes canoniques" alors qu'on pourrait regarder Netflix? Eh bien, parce que les systèmes du second ordre sont partout! Dans l'électronique, la mécanique, la thermique... Comprendre comment ils fonctionnent, c'est comprendre comment le monde fonctionne (enfin, presque). Et puis, ça impressionne toujours votre entourage de sortir des trucs comme "amortissement" et "fréquence naturelle" lors d'un dîner (garanti, vous deviendrez la star de la soirée!).
La Fameuse Forme Canonique: Révélations!
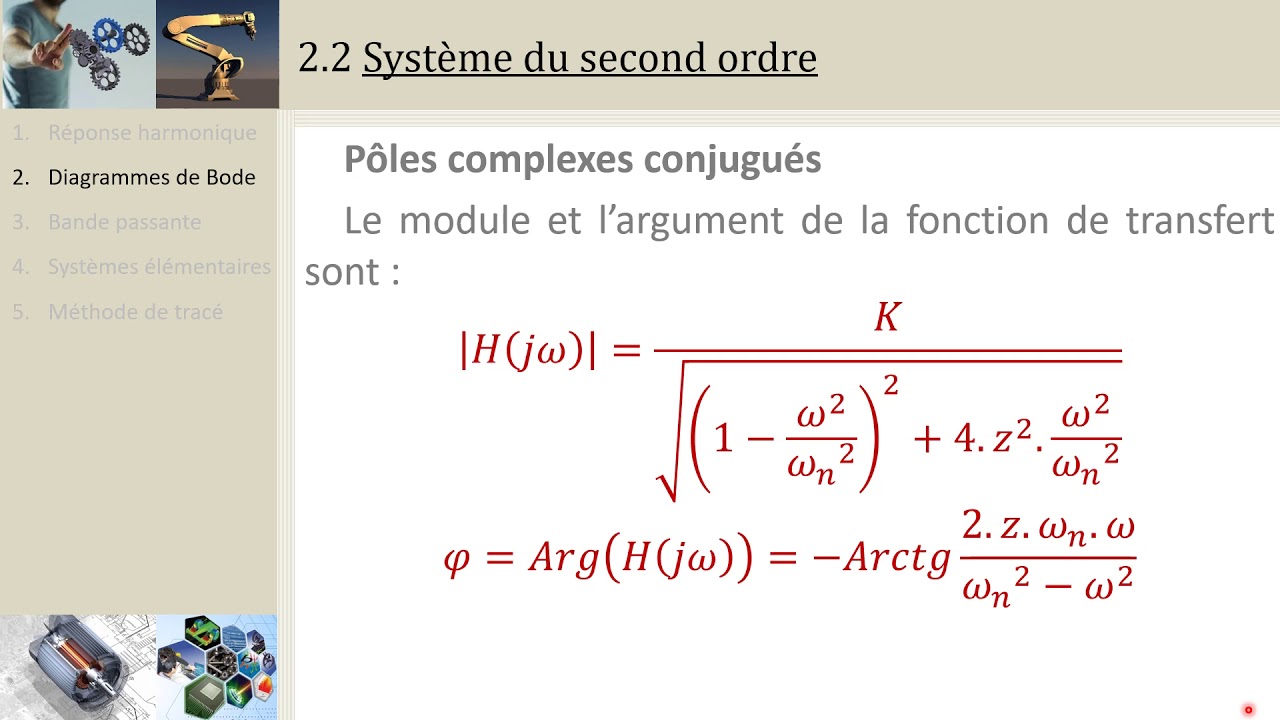
Alors, entrons dans le vif du sujet. La forme canonique d'une fonction de transfert du second ordre, c'est un peu comme l'ADN du système. Elle nous révèle ses caractéristiques fondamentales d'un seul coup d'œil. La formule magique (roulement de tambour!):
H(s) = Kωn2 / (s2 + 2ζωns + ωn2)
OK, respirez un coup. Ça a l'air barbare comme ça, mais on va décortiquer ça ensemble. Promis, vous allez finir par l'aimer (presque autant que votre chat).
- H(s): C'est la fonction de transfert elle-même. Elle décrit comment le système transforme un signal d'entrée en un signal de sortie. Imaginez que c'est la recette de cuisine : vous mettez des ingrédients (le signal d'entrée) et vous obtenez un plat délicieux (le signal de sortie).
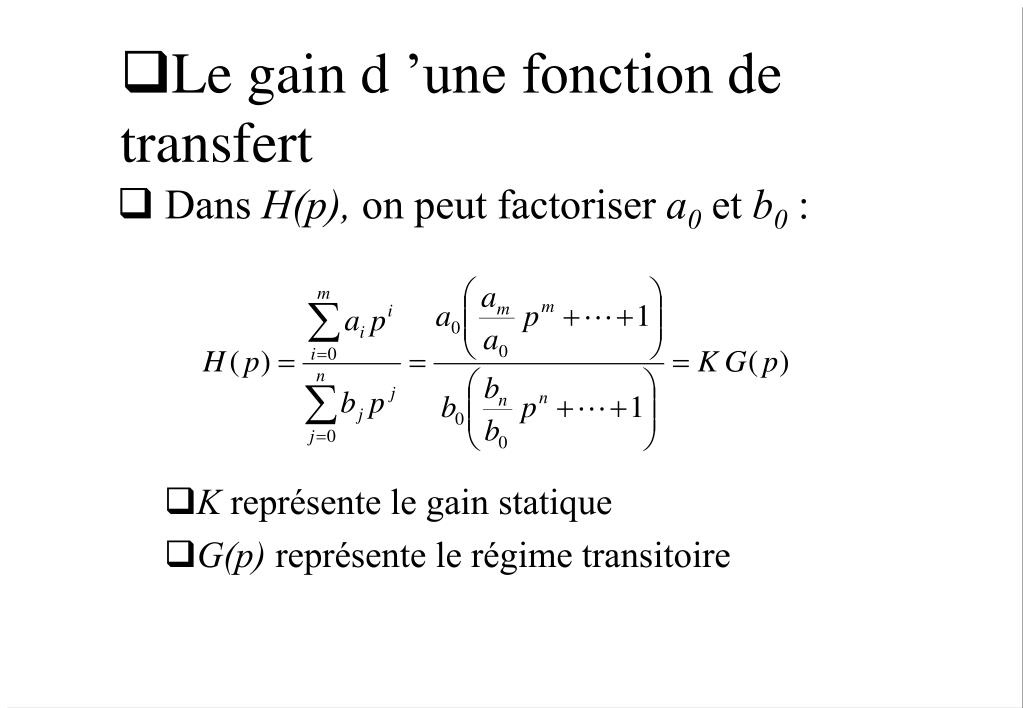
- K: C'est le gain statique. En gros, ça dit de combien le signal de sortie est amplifié (ou atténué) par rapport au signal d'entrée, en régime permanent. Si K = 2, ça veut dire que le signal de sortie est deux fois plus grand que le signal d'entrée (enfin, quand tout s'est stabilisé). C'est un peu comme le bouton de volume de votre chaîne hi-fi.
- ωn: C'est la fréquence naturelle (en radians par seconde). C'est la fréquence à laquelle le système "aime" osciller, si on le laisse faire. Imaginez une cloche : quand on la frappe, elle sonne à une fréquence particulière. C'est sa fréquence naturelle. Si on la frappe plus fort, elle sonnera plus fort, mais pas à une fréquence différente. C'est un peu comme la fréquence à laquelle votre réveil sonne le matin (et que vous détestez, avouez!).
- ζ (zeta): C'est le facteur d'amortissement. C'est lui qui dit à quel point le système est amorti, c'est-à-dire à quel point les oscillations sont atténuées. Si ζ = 0, il n'y a pas d'amortissement et le système oscille indéfiniment (comme une balançoire qu'on ne freine jamais). Si ζ = 1, le système est "critiquement amorti" : il revient à l'équilibre le plus vite possible sans osciller (comme une porte qui se referme doucement). Et si ζ > 1, le système est "sur-amorti" : il revient à l'équilibre lentement et sans osciller (comme une tortue qui traverse la route). C'est un peu comme le frein de votre voiture : il permet de s'arrêter en douceur (ou en catastrophe, si vous freinez trop tard!).
Vous voyez, ce n'est pas si compliqué! En connaissant K, ωn et ζ, on a une idée très précise du comportement du système.
Décryptage des Paramètres: Le Secret des Dieux (enfin, presque)
Maintenant, creusons un peu plus chaque paramètre. Accrochez-vous, on va devenir des experts en la matière!
Le Gain Statique (K): L'Art de l'Amplification
Le gain statique, c'est le coefficient qui dit de combien on amplifie (ou on atténue) le signal en régime permanent. C'est un peu comme un zoom : si K > 1, on zoome (on amplifie) et si K < 1, on dézoome (on atténue). Par exemple, si on a un amplificateur audio avec un gain de 10, ça veut dire que le signal de sortie sera 10 fois plus fort que le signal d'entrée. Attention, il y a une limite : si on amplifie trop, on risque de saturer le système (comme quand on met le volume de la chaîne hi-fi à fond et que le son devient tout pourri). Et si K = 0, alors là, c'est le silence radio! (Pratique pour les voisins, moins pour écouter de la musique).
La Fréquence Naturelle (ωn): Le Rythme du Système
La fréquence naturelle, c'est la fréquence à laquelle le système "aime" osciller. C'est un peu comme la fréquence des battements de votre cœur (enfin, j'espère qu'elle n'est pas trop élevée!). Si on excite le système à sa fréquence naturelle, il va résonner, c'est-à-dire que les oscillations vont devenir de plus en plus importantes (comme une balançoire qu'on pousse au bon moment). C'est ce qu'on appelle la résonance. La résonance peut être utile (par exemple, pour amplifier un signal), mais elle peut aussi être dangereuse (par exemple, si elle provoque des vibrations excessives dans une structure). Imaginez un pont qui entre en résonance à cause du vent... pas très rassurant!
Le Facteur d'Amortissement (ζ): Le Dompteur d'Oscillations
Le facteur d'amortissement, c'est le paramètre qui dit à quel point le système est amorti, c'est-à-dire à quel point les oscillations sont atténuées. C'est un peu comme l'huile dans un amortisseur de voiture : elle permet d'absorber les chocs et d'éviter que la voiture ne rebondisse comme une balle de ping-pong. Selon la valeur de ζ, on a différents types d'amortissement:
- ζ = 0: Pas d'amortissement. Le système oscille indéfiniment, sans jamais revenir à l'équilibre. Imaginez une balançoire qu'on ne freine jamais. C'est le cauchemar de l'ingénieur!
- 0 < ζ < 1: Sous-amortissement. Le système oscille en revenant progressivement à l'équilibre. C'est le cas le plus courant. Imaginez une balançoire qu'on freine légèrement. Elle oscille un peu, mais finit par s'arrêter.
- ζ = 1: Amortissement critique. Le système revient à l'équilibre le plus vite possible sans osciller. C'est l'idéal dans de nombreuses applications. Imaginez une porte qui se referme doucement, sans claquer.
- ζ > 1: Sur-amortissement. Le système revient à l'équilibre lentement et sans osciller. C'est le cas d'une tortue qui traverse la route. C'est peut-être un peu trop lent pour certaines applications, mais au moins, c'est stable!
En résumé, ζ contrôle la "qualité" de la réponse du système. Un ζ trop faible provoque des oscillations indésirables, tandis qu'un ζ trop élevé ralentit la réponse.
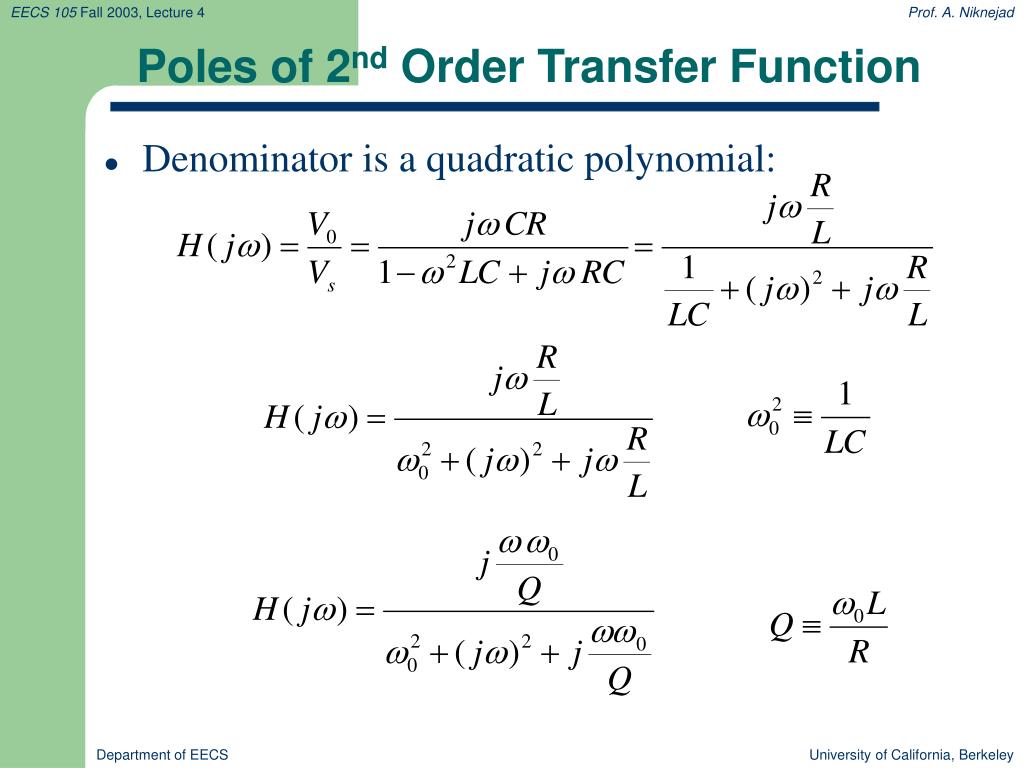
Les Pôles et les Zéros: Les Stars du Spectacle
Maintenant, parlons des pôles et des zéros de la fonction de transfert. Ce sont des concepts un peu plus abstraits, mais ils sont super importants pour comprendre la stabilité du système. Imaginez que ce sont les acteurs principaux de notre pièce de théâtre. Les pôles sont les "méchants" : ils ont tendance à rendre le système instable. Les zéros sont les "gentils" : ils ont tendance à stabiliser le système.
Pour trouver les pôles, il faut résoudre l'équation:
s2 + 2ζωns + ωn2 = 0
On obtient deux pôles (puisqu'on est dans le second ordre). Ces pôles peuvent être réels ou complexes conjugués, selon la valeur de ζ:
- ζ < 1: Les pôles sont complexes conjugués. Cela correspond à un système sous-amorti, qui oscille.
- ζ ≥ 1: Les pôles sont réels. Cela correspond à un système sur-amorti ou critiquement amorti, qui ne oscille pas.
La position des pôles dans le plan complexe (appelé le plan de Laplace) donne des informations précieuses sur la stabilité et la rapidité de la réponse du système. En gros, plus les pôles sont proches de l'axe imaginaire, plus le système est proche de l'instabilité. Et plus ils sont à gauche, plus le système est rapide à revenir à l'équilibre (mais attention aux dépassements si ζ est faible !).
Dans la forme canonique du second ordre que nous avons vue, il n'y a pas de zéros (seulement des pôles). Mais dans des systèmes plus complexes, les zéros peuvent jouer un rôle important pour façonner la réponse.
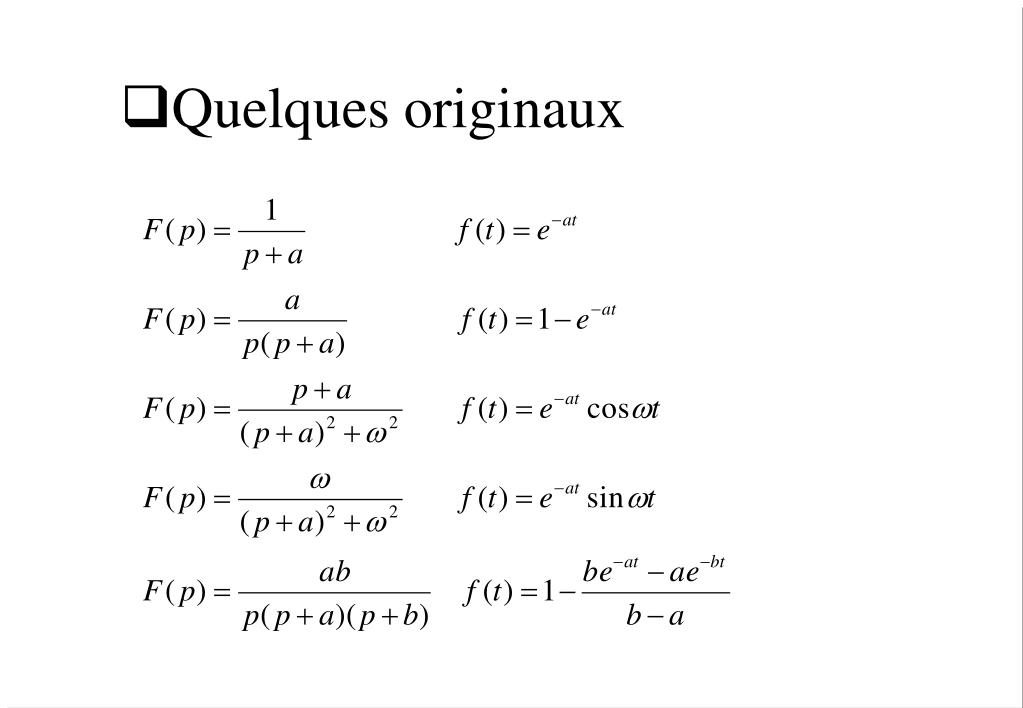
La Réponse Impulsionnelle et la Réponse Indicielle: Le Système en Action
Pour bien comprendre comment se comporte un système du second ordre, il est utile d'analyser sa réponse impulsionnelle et sa réponse indicielle. Imaginez que ce sont des tests de résistance : on soumet le système à des stimuli spécifiques et on regarde comment il réagit.
- La réponse impulsionnelle: C'est la réponse du système à une impulsion, c'est-à-dire un signal très bref et intense (comme un coup de marteau). Elle nous donne des informations sur la stabilité et la rapidité de la réponse du système. Si le système est stable, la réponse impulsionnelle finit par s'éteindre. Si le système est instable, la réponse impulsionnelle diverge (c'est-à-dire qu'elle devient de plus en plus grande).
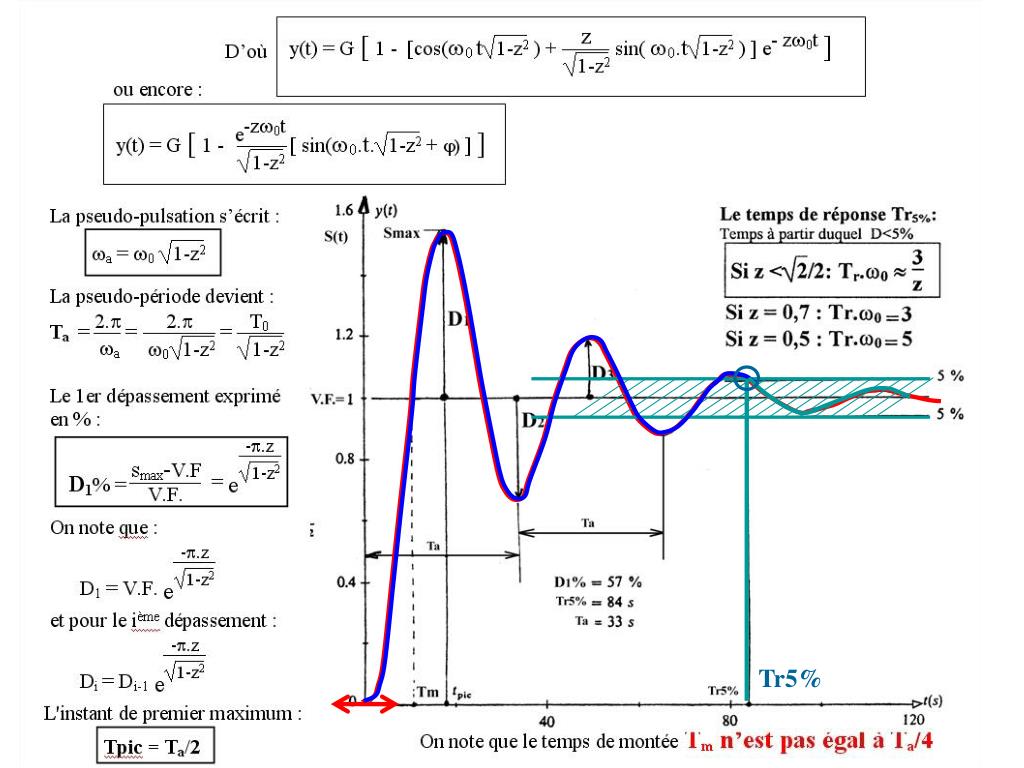
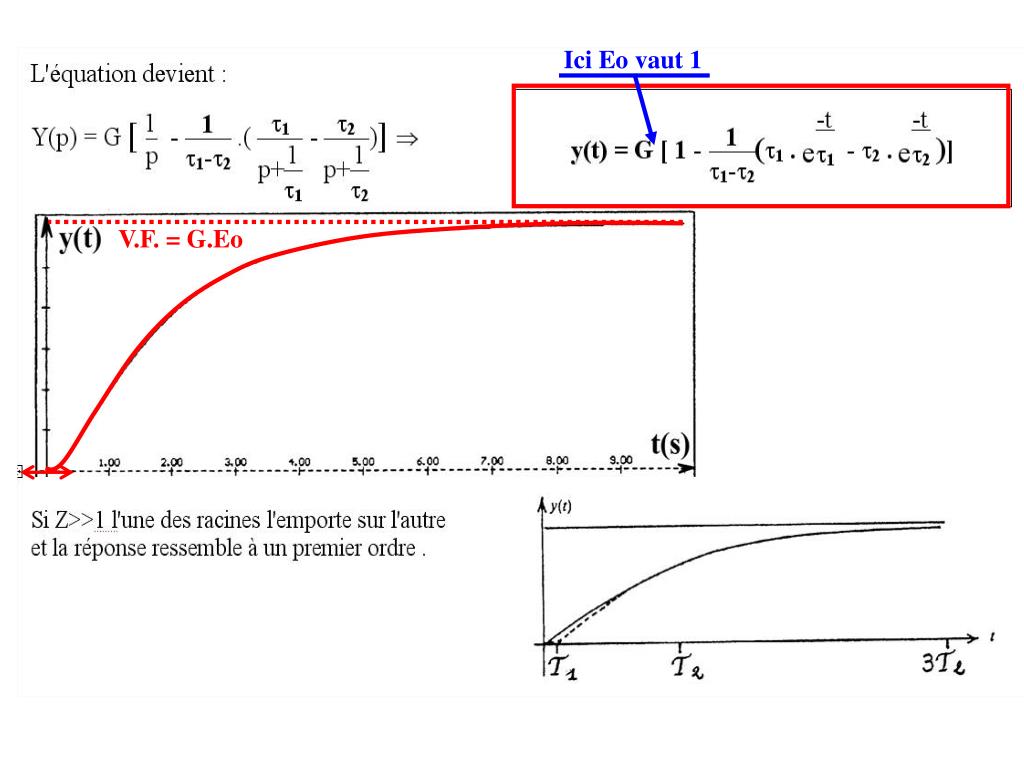
- La réponse indicielle: C'est la réponse du système à un échelon, c'est-à-dire un signal qui passe brusquement de 0 à 1 (comme quand on allume la lumière). Elle nous donne des informations sur la précision, la rapidité et la stabilité du système. On peut caractériser la réponse indicielle par plusieurs paramètres:
- Le temps de montée: C'est le temps qu'il faut au système pour atteindre 90% de sa valeur finale.
- Le temps de stabilisation: C'est le temps qu'il faut au système pour se stabiliser autour de sa valeur finale (généralement à ±2% près).
- Le dépassement: C'est la valeur maximale que le système dépasse sa valeur finale. Un dépassement trop important peut être indésirable.
- L'erreur statique: C'est la différence entre la valeur finale du système et la valeur désirée. Une erreur statique nulle est souvent souhaitable.
En analysant la réponse impulsionnelle et la réponse indicielle, on peut ajuster les paramètres K, ωn et ζ pour obtenir le comportement souhaité du système.
Exemples Concrets: Le Second Ordre dans la Vie de Tous les Jours
Pour que tout ça soit plus concret, voici quelques exemples de systèmes du second ordre que vous croisez tous les jours (sans forcément vous en rendre compte):
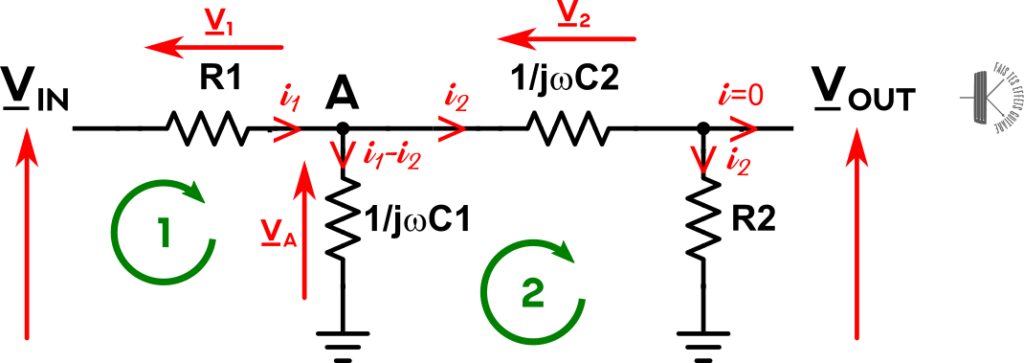
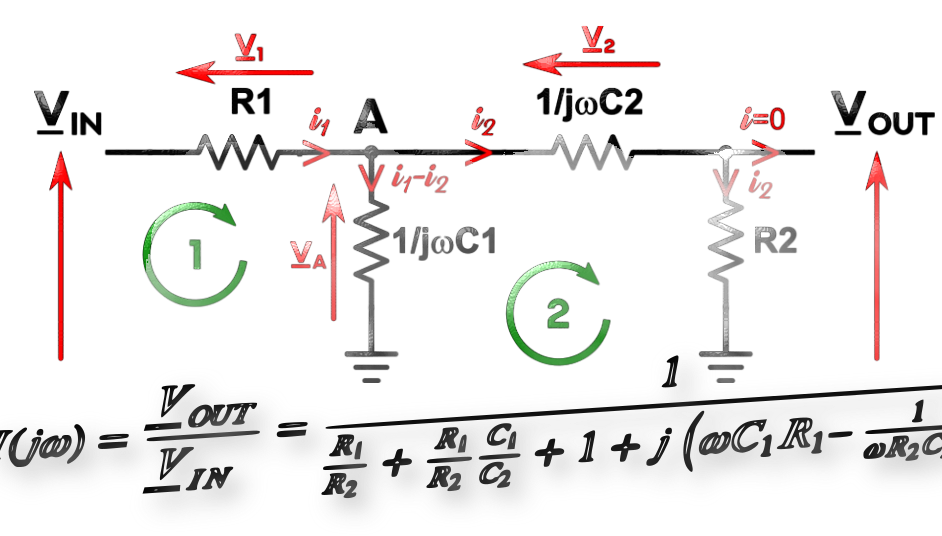
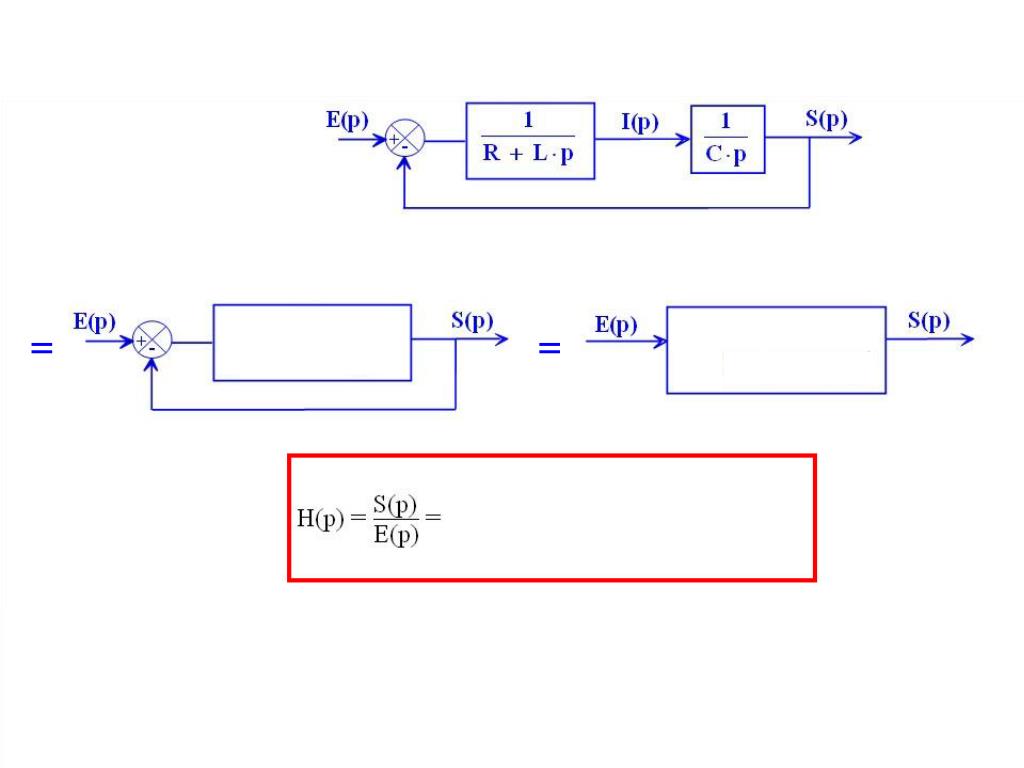
- Un circuit RLC: C'est un circuit électrique composé d'une résistance (R), d'une inductance (L) et d'un condensateur (C). Il est utilisé dans de nombreux appareils électroniques, comme les filtres.
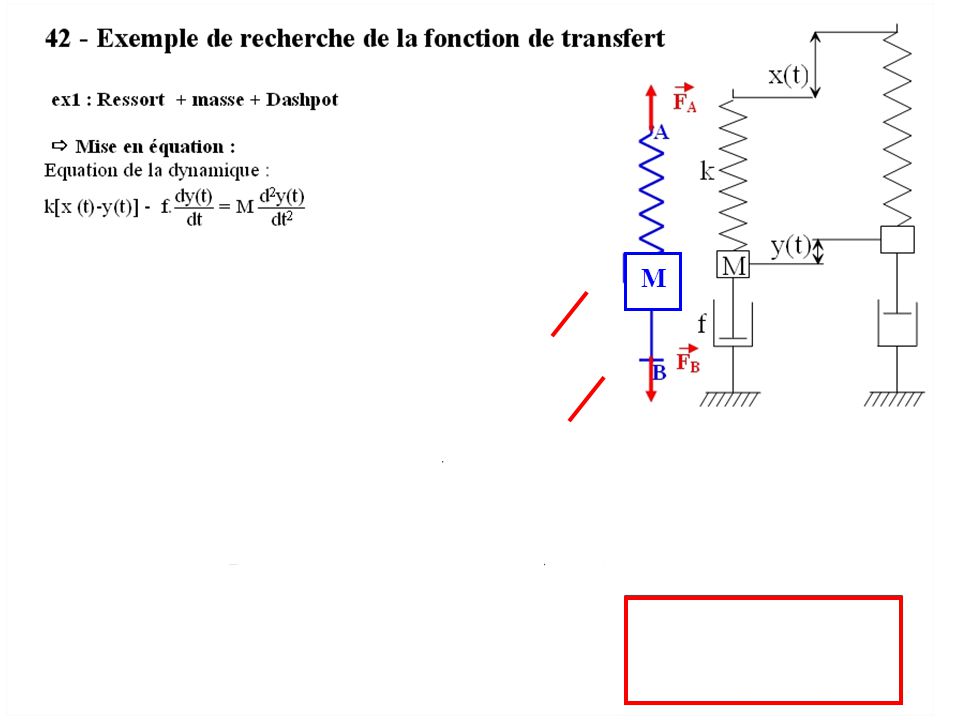
- Un système masse-ressort-amortisseur: C'est un système mécanique composé d'une masse, d'un ressort et d'un amortisseur. Il est utilisé dans les suspensions de voiture, les systèmes d'amortissement des vibrations, etc.
- Un régulateur de température: C'est un système qui maintient la température d'un objet à une valeur constante. Il est utilisé dans les fours, les réfrigérateurs, les climatiseurs, etc.
- Un servo-moteur: C'est un moteur qui permet de contrôler précisément la position ou la vitesse d'un objet. Il est utilisé dans les robots, les imprimantes 3D, les systèmes d'automatisation, etc.
Dans chacun de ces exemples, la forme canonique de la fonction de transfert du second ordre nous permet de comprendre et de contrôler le comportement du système.
Comment Utiliser la Forme Canonique dans la Pratique?
Maintenant que vous êtes des experts en formes canoniques, voyons comment les utiliser concrètement. Voici quelques étapes à suivre:
- Identifiez le système: Déterminez si le système que vous étudiez peut être modélisé comme un système du second ordre. Ce n'est pas toujours le cas, mais c'est une bonne approximation dans de nombreuses situations.
- Déterminez la fonction de transfert: Calculez ou mesurez la fonction de transfert du système. Vous pouvez utiliser des outils de simulation ou des mesures expérimentales.
- Mettez la fonction de transfert sous forme canonique: Manipulez l'équation de la fonction de transfert pour la mettre sous la forme canonique que nous avons vue: H(s) = Kωn2 / (s2 + 2ζωns + ωn2).
- Identifiez les paramètres K, ωn et ζ: Une fois que la fonction de transfert est sous forme canonique, il est facile d'identifier les valeurs du gain statique (K), de la fréquence naturelle (ωn) et du facteur d'amortissement (ζ).
- Analysez le comportement du système: Utilisez les valeurs de K, ωn et ζ pour prédire le comportement du système. Vous pouvez analyser la stabilité, la rapidité, la précision et les oscillations du système.
- Ajustez les paramètres pour optimiser le système: Si le comportement du système n'est pas satisfaisant, vous pouvez ajuster les paramètres K, ωn et ζ pour l'améliorer. Vous pouvez utiliser des techniques de contrôle automatique pour ajuster les paramètres en temps réel.
Par exemple, si vous voulez concevoir un système de suspension pour une voiture, vous pouvez utiliser la forme canonique pour choisir les valeurs du ressort et de l'amortisseur qui minimisent les vibrations et améliorent le confort de conduite. Si vous voulez concevoir un régulateur de température pour un four, vous pouvez utiliser la forme canonique pour choisir les paramètres du régulateur qui maintiennent la température à une valeur précise et stable.
Les Limites de la Forme Canonique (Parce que Rien n'est Parfait!)
Bien sûr, la forme canonique a ses limites. Elle ne s'applique qu'aux systèmes du second ordre linéaires et invariants dans le temps. Dans la réalité, de nombreux systèmes sont non-linéaires ou varient dans le temps. Dans ces cas, la forme canonique n'est qu'une approximation, et il faut utiliser des techniques d'analyse plus avancées.
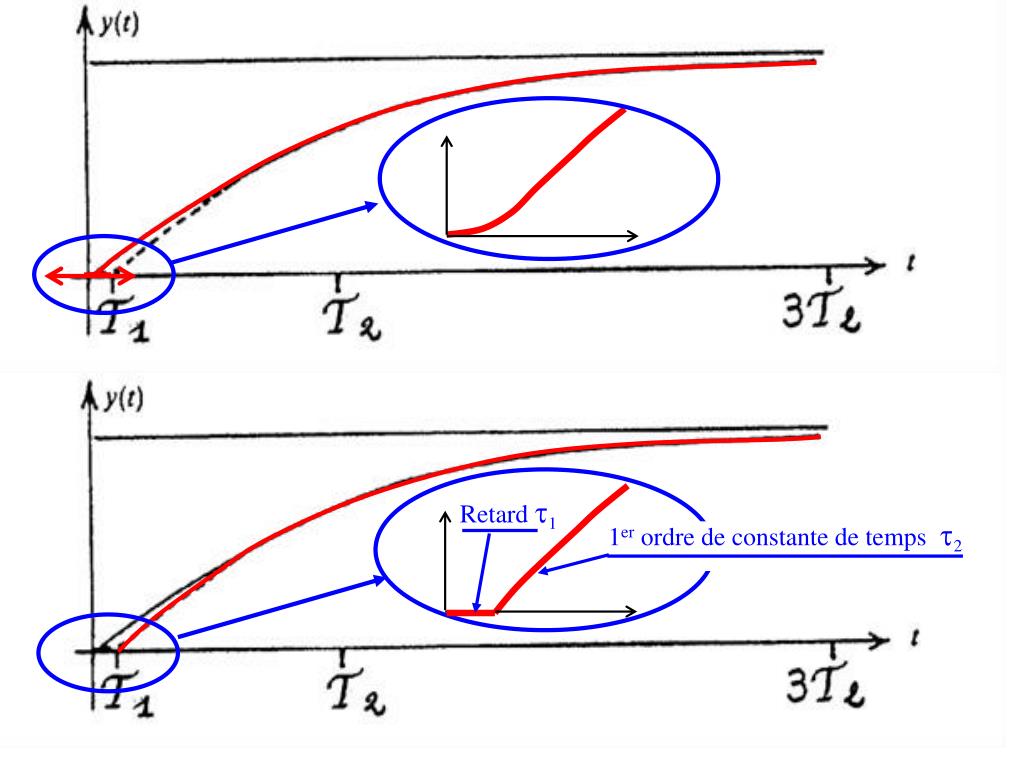
De plus, la forme canonique ne tient pas compte des retards de temps (dead time en anglais) qui peuvent être présents dans certains systèmes. Les retards de temps peuvent dégrader la stabilité et la performance du système. Il faut donc les prendre en compte lors de la conception du système de contrôle.
Enfin, la forme canonique ne donne qu'une vue simplifiée du système. Elle ne permet pas de comprendre tous les détails du comportement du système. Pour une analyse plus complète, il faut utiliser des outils de simulation et des mesures expérimentales.
Conclusion: Alors, Prêt à Devenir un Dompteur de Systèmes du Second Ordre?
Voilà, on a fait le tour de la forme canonique d'une fonction de transfert du second ordre. J'espère que vous avez trouvé ça instructif (et pas trop ennuyeux!). Maintenant, vous avez les outils pour comprendre et contrôler une grande variété de systèmes. Alors, n'hésitez plus, lancez-vous et devenez un dompteur de systèmes du second ordre! Et si jamais vous vous sentez dépassé, rappelez-vous que même les plus grands ingénieurs ont commencé quelque part (et qu'ils ont sûrement séché des cours de maths!).
Et pour finir sur une note d'humour, rappelez-vous : la forme canonique, c'est comme une pizza. Au début, ça paraît indigeste avec toutes ces équations, mais une fois qu'on a compris les ingrédients, on peut la déguster sans modération (enfin, presque!). Et si vous ratez votre pizza (ou votre système), ce n'est pas grave, on peut toujours recommencer! (Sauf si votre robot a déjà explosé... là, c'est plus compliqué!).
![[Exercices] Fonction de transfert](https://forums.futura-sciences.com/attachments/electronique/379358d1544958166-fonction-de-transfert-auto54.jpg)